‚ـ‚¸AVR‘¤‚جƒvƒچƒOƒ‰ƒ€(main.c)‚©‚ç‚إ‚·پBWinAVR(GNU-C)‚إƒRƒ“ƒpƒCƒ‹‚µ‚ؤ‚¢‚ـ‚·پB
|
1-5چs–عپ@WinAVRٹضکAƒwƒbƒ_‚جƒCƒ“ƒNƒ‹پ[ƒh‚إ‚·پB 6-7چs–عپ@AVR‚جPC‚جbit0‚ھƒfپ[ƒ^ƒoƒX‚ةگع‘±‚³‚ê‚ؤ‚¢‚é‚ج‚إپADDRCƒŒƒWƒXƒ^‚ةڈ‘‚«چ‚ٌ‚إ“ü—حپEڈo—ح‚ًگط‚è‘ض‚¦‚邽‚ك‚ج’l 8پA11-13چs–عپ@EZ-USB‚ًژg—p‚µ‚½AVRƒ‰ƒCƒ^پ[پ•ٹJ”ٹآ‹«—p‚جڈˆ—پBڈع‚µ‚‚ح‚±‚±‚جƒyپ[ƒW‚ًژQڈئ‚µ‚ؤ‚‚¾‚³‚¢ 14-15چs–عپ@ƒ|پ[ƒg‚ج“üڈo—ح•ûŒü‚جگف’è 16-20چs–عپ@FIFO‚ًگ§Œن‚·‚邽‚ك‚جٹeژيگMچ†‚جڈ‰ٹْگف’è 21چs–عپ@EP2(PC->ٹO•”‰ٌکHپj‚ئEP6(ٹO•”‰ٌکH->PC)‚ج2‚آ‚جFIFO‚جگط‚è‘ض‚¦‚حFIFOADR‚إچs‚¢‚ـ‚·پB EP2‘I‘ًژ‚ح0پAEP6‘I‘ًژ‚ح2‚ج‚½‚كپAFIFOADR0‚ح‚¢‚¸‚ê‚جڈêچ‡‚إ‚àL‚ة‚ب‚è‚ـ‚·پB 24-54چs–عپ@ƒپƒCƒ“ڈˆ—‚إپAEP2‚ةPC‚©‚çƒfپ[ƒ^‚ً“ا‚فژو‚èپA‚»‚ج‚ـ‚ـEP6‚ةڈ‘‚«ڈo‚µ‚ـ‚·پB 25چs–عپ@EP2‚ةƒfپ[ƒ^‚ھڈ‘‚«چ‚ـ‚ê‚é‚ئپAFLGA‚ھL‚ة‚ب‚é 27-28چs–عپ@ƒfپ[ƒ^پ[ƒoƒX‚ً“ü—ح‚ةگف’è 29-32چs–عپ@SLCSپASLOEپASLRD‚ًL‚ةƒZƒbƒg EP2‚ً‘I‘ً‚·‚邽‚كFIFOADR1=0 34-35چs–عپ@ƒfپ[ƒ^‚ً“ا‚فچ‚ق 36-37چs–عپ@SLCSپASLOE‚ًH‚ة‚µ‚ؤFIFO‚ًٹJ•ْ 39چs–عپ@EP6‚ً‘I‘ً‚·‚邽‚ك‚ةFIFOADR1=1 40-41چs–عپ@ƒfپ[ƒ^ƒoƒX‚ًڈo—ح‚ةگط‚è‘ض‚¦ 42-48چs–عپ@ƒfپ[ƒ^‚ًڈo—ح 49-50چs–عپ@SLCSپASLWR‚ًL‚ة‚µ‚ؤEP2‚ةڈ‘‚«چ‚ق 51-52چs–عپ@SLCSپASLWR‚ًH‚ة‚µ‚ؤFIFO‚ًٹJ•ْ |
PC‘¤‚جƒvƒچƒOƒ‰ƒ€(main.c)‚ح‚±‚ج‚و‚¤‚ة‚ب‚è‚ـ‚·
ژg—p‚·‚éƒpƒCƒv
| ƒvƒچƒOƒ‰ƒ€’†‚إ‚ج –¼‘O |
ƒGƒ“ƒhƒ|ƒCƒ“ƒg | ƒpƒCƒv”شچ† | —p“r |
| CPIPE | OUT2 | 1 | ƒRƒ}ƒ“ƒhپA ƒpƒ‰ƒپپ[ƒ^پA ‘—گM—p |
| TFIFO | OUT2 (EP2) |
0 | EP2(PC->ٹO•”‰ٌکHپj ‘—گM—p |
| RFIFO | IN6 (EP6) |
2 | ƒRƒ}ƒ“ƒhŒ‹‰تپA EP6(ٹO•”‰ٌکH->PC) ژَگM—p |
|
16-23چs–عپ@CMD_USBCSƒRƒ}ƒ“ƒh‚ًژg—p‚µ‚ؤFX2‚ھUSB2.0‚ ‚é‚¢‚حUSB1.0‚ج‚ا‚؟‚ç‚ةگع‘±‚³‚ê‚ؤ‚¢‚é‚©’²‚ׂؤپAUSB‚جژي•ت‚ة‚ ‚ي‚¹‚½ƒGƒ“ƒhƒ|ƒCƒ“ƒg‚ج’·‚³‚ًƒZƒbƒg‚µ‚ـ‚·پB ‚±‚ê‚ة‚و‚ء‚ؤپAUSB2.0/USB1.0‚ج‚ا‚؟‚ç‚إ‚à“®چى‚إ‚«‚ـ‚·پB 24-26چs–عپ@“]‘—‚·‚éƒfپ[ƒ^‚جڈ‰ٹْ‰» 28-30چs–عپ@FX2FW‚جƒ‚پ[ƒh‚ًFIFOƒ‚پ[ƒh‚ةگف’èپB ƒfپ[ƒ^ƒoƒX‚ج•‚ح16bit‚ًژw’肵‚ـ‚·پB 32چs–عپ@ƒpƒCƒvTFIFO‚ةƒGƒ“ƒhƒ|ƒCƒ“ƒg‚ج’·‚³•ھ‚جƒfپ[ƒ^‚ًڈ‘‚«چ‚ف‚ـ‚·پB 33چs–عپ@ƒpƒCƒvRFIFO‚©‚çƒGƒ“ƒhƒ|ƒCƒ“ƒg‚ج’·‚³•ھ‚جƒfپ[ƒ^‚ً“ا‚فچ‚ف‚ـ‚·پB |
ژہچغ‚ةژہچs‚µ‚½‚ئ‚«‚ج”gŒ`‚جˆê•”‚إ‚·
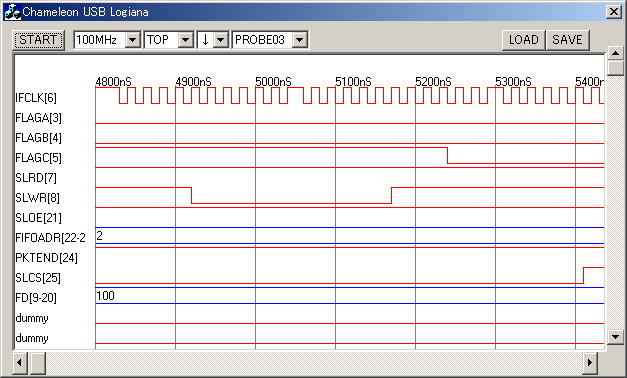
SLWR‚ًL‚ة‚µ‚ؤƒfپ[ƒ^‚ًڈ‘‚«چ‚ٌ‚إ‚¢‚ـ‚·پBڈ‘‚«چ‚ف‚ھٹ®—¹‚·‚é‚ئپAFLAGC‚ھLپiEP6‚ھ‹َ‚إ‚ب‚¢پj‚ة‚ب‚é‚ج‚ھٹm”F‚إ‚«‚ـ‚·پB
AVR‚جƒ\پ[ƒX‚¨‚و‚رPC‘¤‚جƒ\پ[ƒXˆêژ®‚ح‚±‚؟‚ç‚©‚çƒ_ƒEƒ“ƒچپ[ƒh‚µ‚ؤ‚‚¾‚³‚¢پB
•ت‚جƒTƒ“ƒvƒ‹‚إAVR‘¤‚©‚çPKTENDگMچ†‚ًژg—p‚µ‚ؤپAƒGƒ“ƒhƒ|ƒCƒ“ƒg‚ة“r’†‚ـ‚إڈ‘‚«چ‚ٌ‚¾ڈَ‘ش‚إپAƒGƒ“ƒhƒ|ƒCƒ“ƒg‚ج“]‘—‚ًچs‚¤ƒTƒ“ƒvƒ‹‚à—pˆس‚µ‚ؤ‚¨‚«‚ـ‚·پB‚±‚؟‚ç‚©‚çƒ_ƒEƒ“ƒچپ[ƒh‚µ‚ؤ‚‚¾‚³‚¢پB