- `define DEBUG
- module spd_chk(FX2_SLOE, FX2_SLRD, FX2_SLWR, FX2_FD, FX2_FIFOADR, FX2_PKTEND,
- FX2_FLAGA, FX2_FLAGB, FX2_FLAGC, FX2_IFCLK,
- MODE, ADDR, RST, DIR,
- `ifdef DEBUG
- TP
- `endif
- );
|
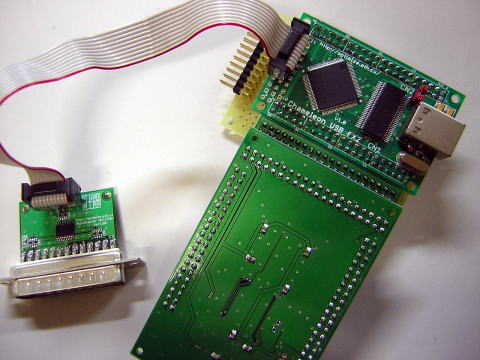
モジュール定義部分です。FX2_が先頭に付く信号は、「カメレオンUSB FX2」基板内部でFX2LPと接続されている信号ですので、全て記述しておきます。Qualtusツールの「Pin
Planner」ツールでMAX2のI/Oピンに割り当てます。
1行目のDEBUGがデファインされている場合は、TP(テストポート)信号が有効になります。私の場合はTPをロジアナに接続してデバッグを行っています。 |
- output FX2_SLOE;
- output FX2_SLRD;
- output FX2_SLWR;
- inout [7:0] FX2_FD;
- output [1:0] FX2_FIFOADR;
- output FX2_PKTEND;
- input FX2_FLAGA;
- input FX2_FLAGB;
- input FX2_FLAGC;
- input FX2_IFCLK;
|
| 4行目 のFIFO用データバスは8bitで使用します。MAX2のレジスタのリードライトにもこのバスを使用しています。 |
- `ifdef DEBUG
- output [11:0] TP;
- assign TP[0] = FX2_SLRD;
- assign TP[1] = FX2_SLWR;
- assign TP[2] = FX2_FLAGA;
- //assign TP[2] = cmp_err;
- assign TP[3] = FX2_FLAGB;
- assign TP[11:4] = FX2_FD;
- `endif
|
| デバッグ用の信号をTPに割り振っています。DEBUG時のみ有効になります。 |
- `define MODE_IDLE 0
- `define MODE_REGR 1
- `define MODE_REGW 2
- `define MODE_START 3
- input [1:0] MODE;
-
- input [1:0] ADDR;
- input RST;
-
- `define DIR_FX2PC 0
- `define DIR_PC2FX 1
- input DIR;
|
1−5行目は 動作モードをFX2LPからMAX2に伝えるための信号の定義です。(FX2LPのPD7、PD6と接続)
7行目はMAX2のレジスタを選択するためのアドレス線として使用します。(FX2LPのPD0、PD1と接続)
8行目はMAX2のリセット用信号として使用しています。(FX2LPのPD2と接続)
10-12行目はFIFOの転送方向をMAX2に伝えるために使用します。(FX2LPのPD3と接続) |
- reg [31:0] init_val;
-
- always @(posedge FX2_IFCLK)
- begin
- if(MODE == `MODE_REGW) begin
- if (ADDR == 0) init_val[7:0] <= FX2_FD;
- else if(ADDR == 1) init_val[15:8] <= FX2_FD;
- else if(ADDR == 2) init_val[23:16] <= FX2_FD;
- else if(ADDR == 3) init_val[31:24] <= FX2_FD;
- end
- end
|
| PCに送信するデータのシードを保持するレジスタinit_valの書き込み処理です。モードがMODE_REGWの時にFX2_FDバスからデータを取り込みます。FX2_FDバスは8bitですのでアドレス信号にて切り替えを行います。書き込みのタイミングにはIFCLKを使用しています。 |
- reg slwr,slrd;
- reg [31:0] cnt32;
- reg [30:0] wait_cnt31;
- reg [1:0] cnt2;
- reg [7:0] cnt32_8;
- reg cmp_err;
- reg first_skip; //first data is invalid
|
内部レジスタの定義です。
slwrはFIFO書き込み時に0になります。slrdはFIFO読み込み時に0になります。
cnt32は送信データ用の32bitカウンタです。
cnt2はcnt32を1byteずつ送信するためのカウンタです。
cnt32_8はcnt32をラッチする送信用の8bitバッファです。
cmp_errは受信データの正当性をチックし、正しくない場合に1になります。
first_skipは4同期転送時の受信タイミング調整用で、最初のクロックを無視するためのフラグです。 |
- always @(posedge FX2_IFCLK)
- begin
- if(RST) begin
- cnt32 <= init_val;
- wait_cnt31 <= 0;
- cnt2 <= 0;
- slwr <= 1;
- slrd <= 1;
- cmp_err <= 0;
- first_skip <= 1;
|
回路全体はIFCLKの立ち上がり信号による同期回路になります。
3−10行目でRST信号によるレジスタに初期値の設定を行います。
4行目はPCから書き込んだカウンタの種をカウンタにセットしています。 |
- end else if((((FX2_FLAGB == 1)&&(DIR == `DIR_FX2PC)) ||
- ((FX2_FLAGA == 1)&&(DIR == `DIR_PC2FX))) &&
- (MODE == `MODE_START)) begin
- if(DIR == `DIR_FX2PC) begin
- slwr <= 0;
- if (cnt2 == 0) cnt32_8 <= cnt32[7:0];
- else if(cnt2 == 1) cnt32_8 <= cnt32[15:8];
- else if(cnt2 == 2) cnt32_8 <= cnt32[23:16];
- else if(cnt2 == 3) cnt32_8 <= cnt32[31:24];
- if(cnt2 == 3) cnt32 <= cnt32 + 1;
- end
|
1−3行目 モードが転送モード(MODE_START)の場合に、FIFOの状況をFLAG信号でチェックして、FIFOに空き(あるいはデータが届いている)状態であれば、FIFOに書き込み(読み込み)を行います。
4−11行目 転送方向が(FX2 -> PC)の場合の処理。
slwrをアクティブにして、cnt2の値にしたがって、8bitレジスタcnt32_8にcnt32の内容をコピーします。4回コピーが終わったら、cnt32をインクリメント。 |
- if(DIR == `DIR_PC2FX) begin
- slrd <= 0;
- if((cnt2 == 1) && (FX2_FD != cnt32[ 7: 0])) cmp_err
<= 1;
- if((cnt2 == 2) && (FX2_FD != cnt32[15: 8])) cmp_err
<= 1;
- if((cnt2 == 3) && (FX2_FD != cnt32[23:16])) cmp_err
<= 1;
- if(first_skip == 0) begin
- if((cnt2 == 0) && (FX2_FD != cnt32[31:24])) cmp_err
<= 1;
- if(cnt2 == 0) cnt32 <= cnt32 + 1;
- end
- first_skip <= 0;
- end
|
転送方向が(PC -> FX2)の場合の処理。
slrdをアクティブにして、FIFOバスの内容に正しい値が入っているかチェックする。エラー時はcmp_errに1をセット。
slrdをアクティブにした最初のデータは無効なので、これをネグルためにfirst_skipを使用。 |
- cnt2 <= cnt2 + 1;
- end else begin
- if(MODE == `MODE_START) wait_cnt31 <= wait_cnt31 + 1;
- slwr <= 1;
- slrd <= 1;
- cnt2 <= 0;
- first_skip <= 1;
- end
- end
|
1行目 はcnt2レジスタのインクリメント。
3行目 転送開始状態なのに、FIFOが一杯(空)のため待ちの場合は、wait_cnt31をインクリメント。
4−7行目 転送が行われないときの状態をセット。 |
- wire [7:0] reg_data;
- assign reg_data = (ADDR == 0) ? wait_cnt31[7:0] :
- (ADDR == 1) ? wait_cnt31[15:8] :
- (ADDR == 2) ? wait_cnt31[23:16] : { cmp_err, wait_cnt31[30:24]
};
-
- wire [7:0] fifo_data;
- assign fifo_data = cnt32_8;
-
- assign FX2_SLOE = ((MODE == `MODE_START)&&(DIR == `DIR_PC2FX)) ? 0 : 1;
- assign FX2_FIFOADR = (DIR == `DIR_FX2PC) ? 2 : 0;
- assign FX2_PKTEND = 1;
- assign FX2_SLRD = slrd;
- assign FX2_SLWR = slwr;
- assign FX2_FD =
- ((MODE == `MODE_REGW) || ((MODE == `MODE_START) && (DIR ==
`DIR_PC2FX))) 8'bzzzzzzzz :
- (MODE == `MODE_REGR) ? reg_data : fifo_data;
-
- endmodule
|
1−4行目 MAX2レジスタ読出しのための定義、32bit目には検証結果cmp_errのフラグをセット。
9−16行目 モード状態、転送方向(DIR)の状態に応じて、FX2の制御信号をコントロールする。 |